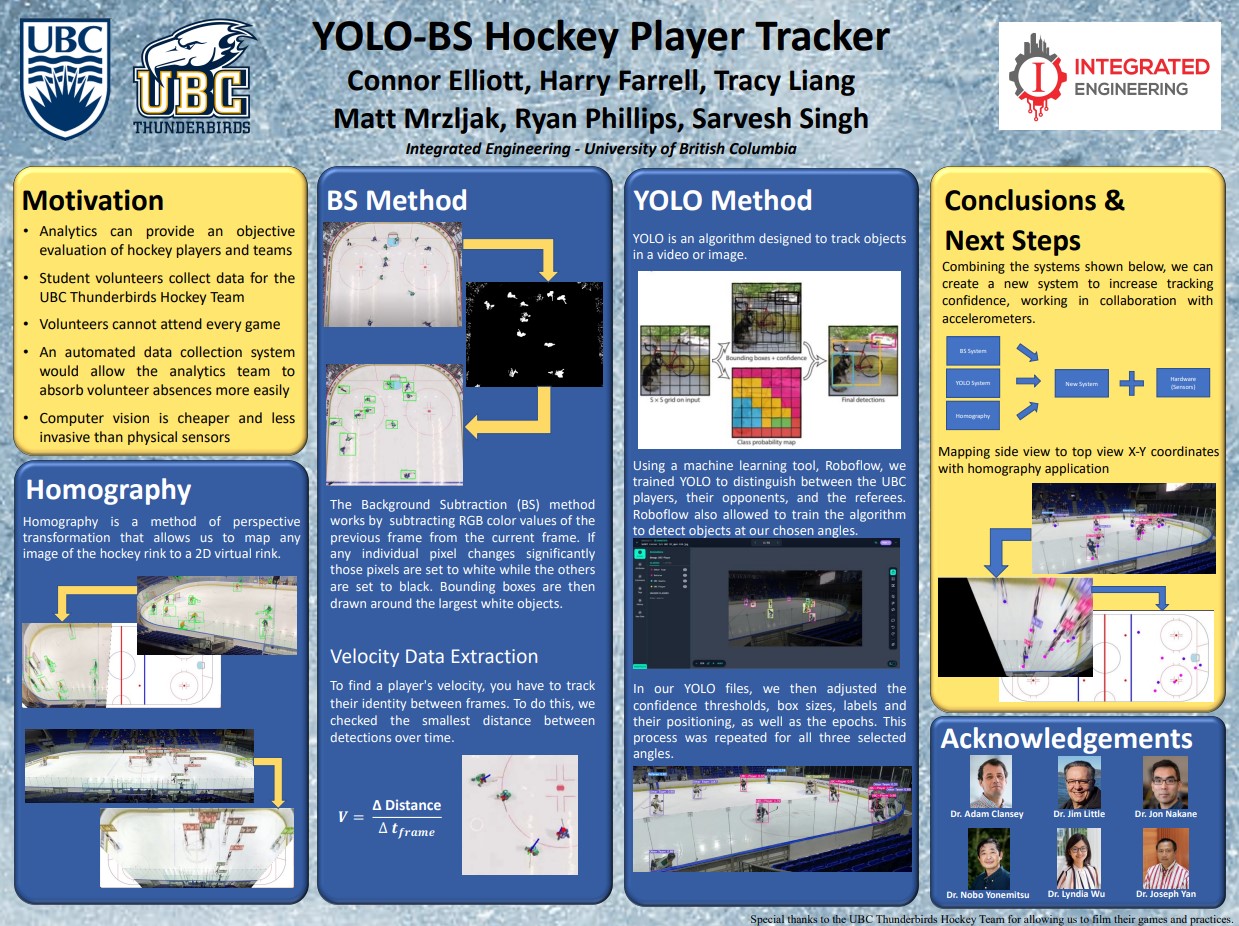
YOLO-BS Hockey Player Tracking System
October 2022 - April 2023
In a group of 5 other Integrated Engineering (IGEN) students, we worked on capstone project as part of our IGEN 230 course at UBC. We utilized 3 different software methods to track hockey players in pre-recorded games of the UBC Men's Ice Hockey team.
Using homography, background subtracting, and object detection methods to track hockey players (and other objects in the video clip), we can further the tracking analyses with physical trackers such as accelerometers.